Google Maps System Design | Micro Graphs | Segments | Main Components
Micro graphs, segments, and navigation system design with a deep dive

Welcome to the 54 new subscribers who have joined us since last week.
If you aren’t subscribed yet, join 1000+ engineers and technical managers learning Advanced System Design.
Today, we’re going to design Google Maps and cover the following components:
A map as a network of nodes and segments
A map as micro graphs
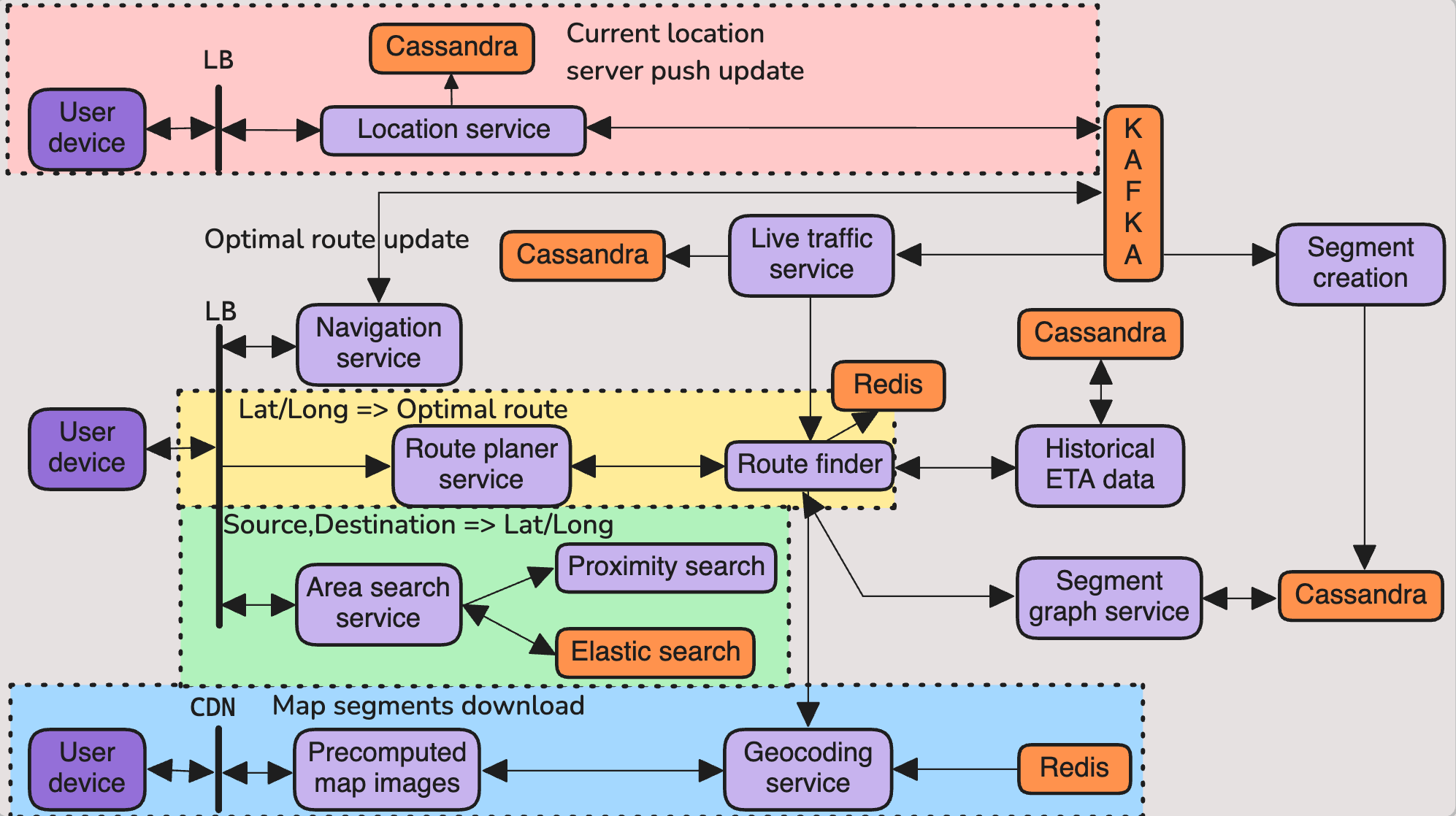
Main components and overall design
Deep dive (video version)
Google Maps is a global-scale spatial platform that integrates maps, search, routing, and real-time data. Designing something like this requires careful thinking about data modeling, system components, and performance at massive scale. Two core ideas that drive the system are segments (the smallest units of the road network) and micrographs (localized subgraphs of the network used for fast queries).